2025·IEEE International Conference on Automation Science and Engineering (CASE 2025) GPD: Guided Polynomial Diffusion for Motion Planning Paper Project
2024·IEEE International Conference on Robotics and Automation (ICRA 2024) EDMP: Ensemble-of-costs-guided Diffusion for Motion Planning Paper Project Code Video
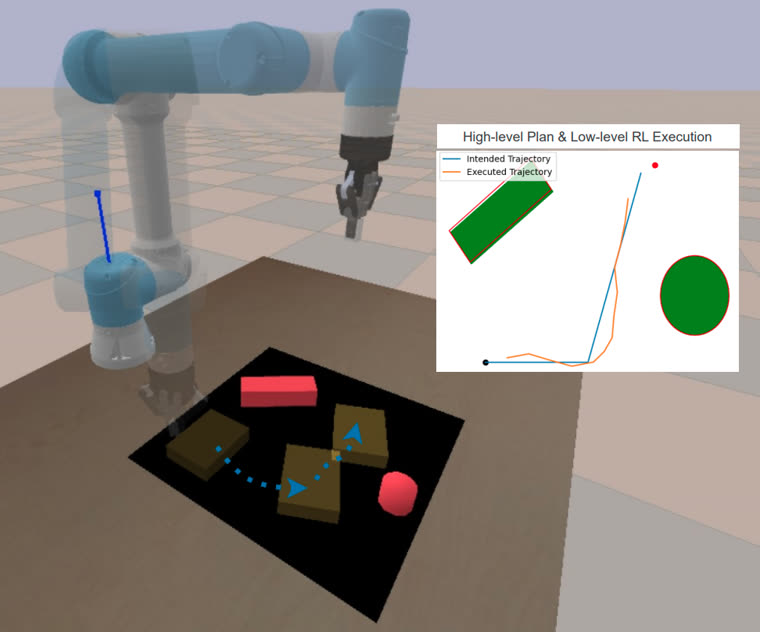
2023·IEEE International Conference on Automation Science and Engineering (CASE 2023) Disentangling Planning and Control for Non-prehensile Tabletop Manipulation Paper
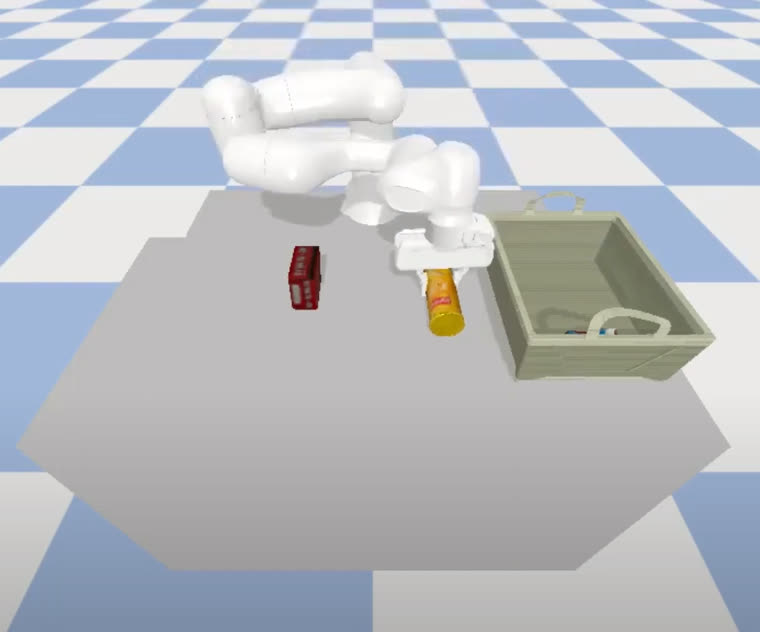
2022·ICRA 2022 Open Cloud Robot Table Organization Challenge (OCRTOC) — 3rd Place Approaches and Challenges in Robotic Perception for Table-top Rearrangement and Planning Paper Code Video News Press