
I am a research assistant at IIIT-Hyderabad, currently advised by Prof. K. Madhava Krishna (IIIT-Hyderabad) and Prof. Arun Kumar Singh (University of Tartu) in the Robotics lab (RRC), and Prof. Makarand Tapaswi (IIIT-Hyderabad) and Dr. Vladimir Petrik (CTU, Prague) in the Computer Vision lab (CVIT). I currently work at the intersection of generative models, robot learning, and video understanding.
I earned my Bachelor of Technology with honors in Computer Science and Engineering (CSE) from IIIT-Hyderabad, India. During my undergraduate years, I led various projects involving robotic manipulators, reinforcement learning, motion planning, and collision avoidance, under the guidance of Prof. K. Madhava Krishna.
What have I been up to? Robotics is inherently multidisciplinary, and my work reflects this diversity. So far, I have worked on a wide array of topics, including physics engines, generative models, reinforcement learning, classical TAMP, and Gaussian Splatting. More recently, I have been working on hardware, building a small yet capable robot as an ideal testbed for my experiments.
Now and Next Steps: I believe that access to large-scale, trainable data is one of the most critical requirements for robotics today. My research, hence, focusses heavily on scaling up data for robot learning, leveraging a wide variety of sources. I hope to see robotics reach its true 'ImageNet/ChatGPT moment' by early 2026.
- Everything is theoretically impossible, until it is done - Robert A. Heinlein
Publications
|
GPD: Guided Polynomial Diffusion for Motion Planning* denotes equal contribution |
|
EDMP: Ensemble-of-costs-guided Diffusion for Motion Planning* denotes equal contribution and random author order |
|
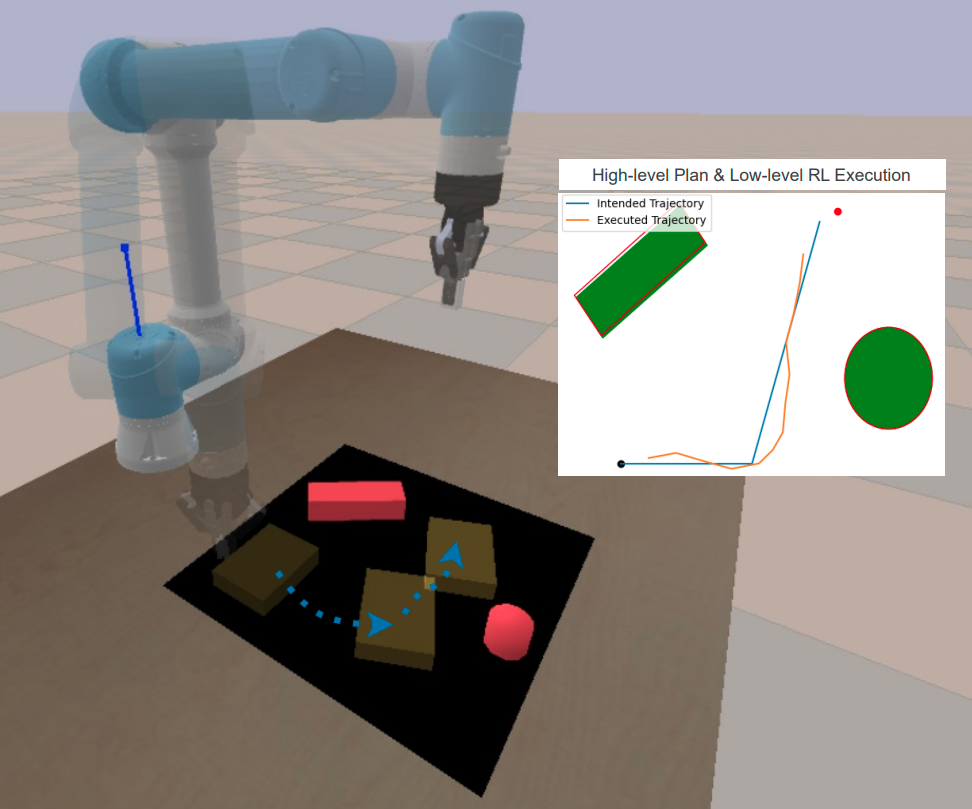
Disentangling Planning and Control for Non-prehensile Tabletop Manipulation |
|
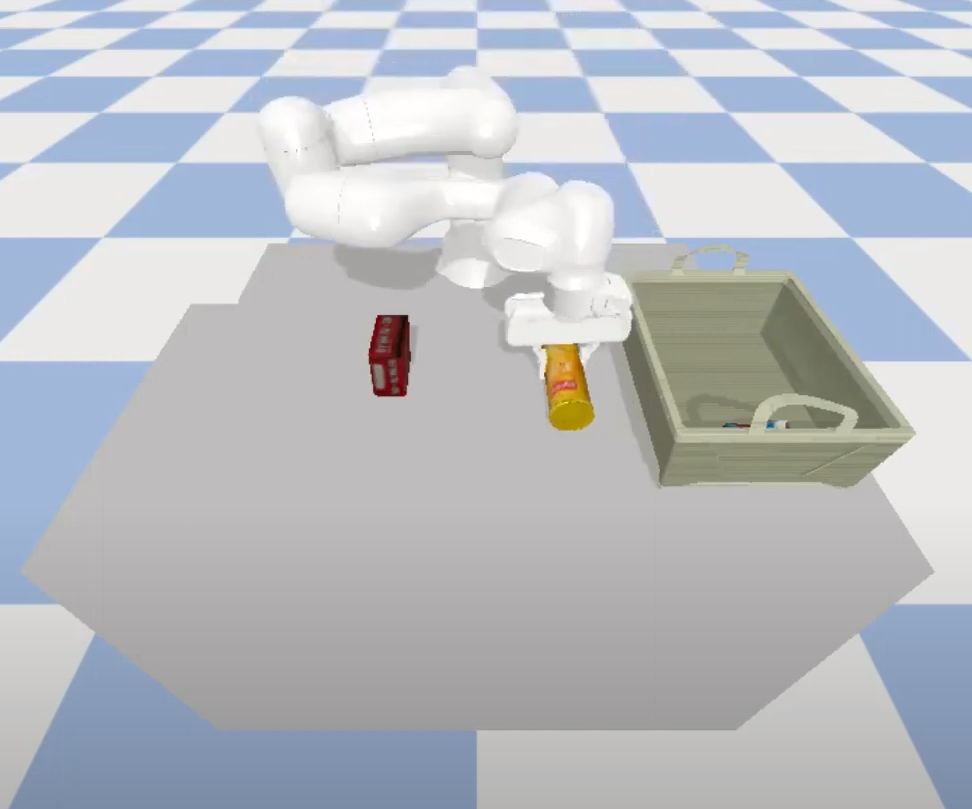
Approaches and Challenges in Robotic Perception for Table-top Rearrangement and PlanningAditya Agarwal*, Bipasha Sen*, Shankara Narayanan V*, Vishal Reddy Mandadi*, Brojeshwar Bhowmick, K Madhava Krishna * denotes equal contribution and random author order |
{kind=link}